I/NAV Improvements: Three features to enhance the Galileo Open Service
To improve the performance of the Galileo Open Service (OS), three new features, further detailed in the I/NAV Navigation Message Improvements Info Note, were introduced in the Galileo OS SIS ICD 2.0 published in January 2021:
• Reduced Clock and Ephemeris Data (RedCED)
• Reed-Solomon Outer Forward Error Correction (RS FEC2) encoding of the Clock and Ephemeris Data (CED)
• Secondary Synchronisation Patterns (SSP)
These features, collectively referred to as “I/NAV improvements” and fully backward compatible with existing Galileo receivers, are available free of charge for all users of the Galileo Open Service (OS). Their implementation in the Galileo constellation started in August 2022 and it was completed in August 2023. The I/NAV improvements are openly accessible through the I/NAV message [1] carried by the E1-B signal.
Reduced CED
The newly introduced Reduced Clock and Ephemeris Data, called RedCED, compresses the CED parameters into 122 bits that can be transmitted in a single I/NAV word (I/NAV-16). Based on RedCED the reception of the single I/NAV-16 word is sufficient. RedCED allows for a fast, initial position fix, albeit with lower than nominal accuracy, by only decoding one single I/NAV word and while waiting to receive the four I/NAV words carrying the full-precision CED. In this way, a TTFF (95% of the time) of up to 16 seconds can be achieved with a GNSS receiver using only Galileo signals, in open sky conditions.
Reed Solomon Outer Forward Error Correction
The additional Reed Solomon (RS) Clock and Ephemeris Data (CED) encoded by the RS FEC2 is transmitted in the I/NAV words (I/NAV-17, -18, -19, -20) providing redundant information on top of the CED I/NAV words (I/NAV-1, -2, -3, -4). The RS-CED words provide the capability to correct residual errors as well as to recover erased information.
This I/NAV improvement enables increased demodulation robustness and therefore enhances the sensitivity in harsh environments but also improves the overall Time to retrieve Clock and Ephemeris Data (time to CED) in nominal conditions thanks to the broadcast of additional, redundant information.
Secondary Synchronisation Pattern
This new information provided within the I/NAV message allows reconstruction of the Galileo system time as long as a coarse synchronisation (+/-3 seconds) is already available. User receivers can perform the correlation with the SSP sequence at symbol level without the need to demodulate the navigation message, thereby enabling time synchronisation even with weak signals.
Backward Compatibility
These new features are included in the I/NAV navigation message of the satellites that have been upgraded, and full backward compatibility is guaranteed, i.e. there is no impact on receivers developed following previous issues of the OS SIS ICD (Issues 1.4 or earlier) that are already on the market. Consequently, when the Galileo satellites start transmitting these new I/NAV messages, receiver manufacturers can decide whether or not to exploit them.
Performance Improvements
The Galileo Programme is committed to continuous enhancement of the Galileo Open Service. With I/NAV improvements, Galileo enables the possibility to considerably boost user performance in terms of robustness and Time To First Fix (TTFF). In this context, ‘robustness’ includes the capability of the navigation message to enable a fast reconstruction of the Galileo System Time (GST). Additionally, as the time to receive clock corrections and ephemeris data is a major contribution to the TTFF in many conditions, a reduction of this time supports in general all applications that require reception of this data from navigation signals.
As explained above, the Reduced CED and the RS FEC2 enable receivers to reduce the time to first fix by reducing the time to CED.
The improvement in terms of time to (full and reduced) CED as expected for a user implementing RedCED and RS FEC2 is provided in the figures hereafter for some example cases, i.e., a user in an open sky environment, a vehicular user (50 km/h) in an urban environment and a pedestrian user (5 km/h) in an urban environment [2]. For all cases, the Time-to-CED expected with the legacy I/NAV data is always provided as a means of comparison. Note that in the figures the time axes represent the 95% success rate.
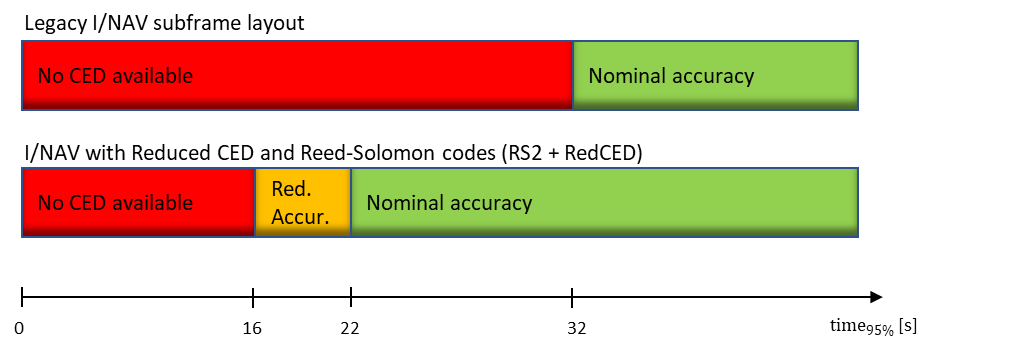
Figure 1: Time to CED (95%) for a user with perfect channel conditions in an open sky environment (from design phase)
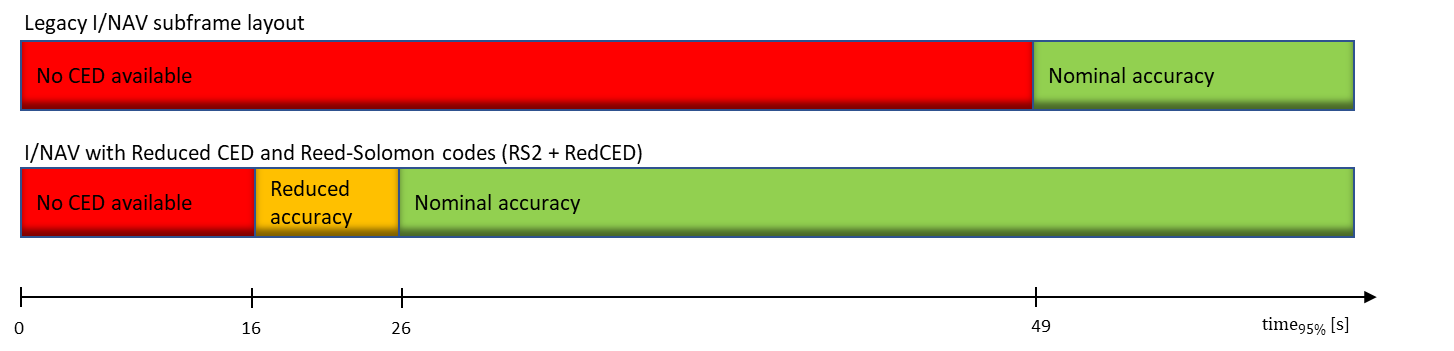
Figure 2: Time to CED (95%) for a vehicular user (50 km/h) in an urban environment (from design phase)
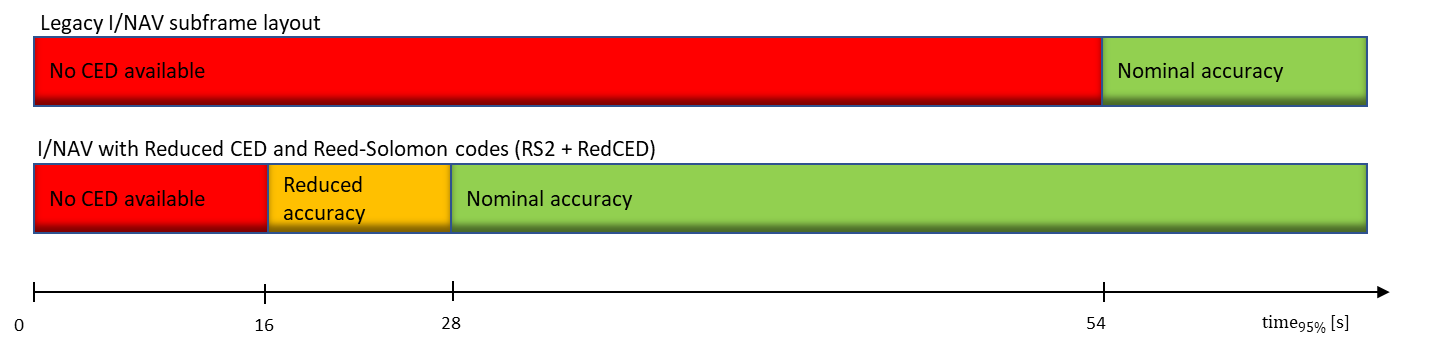
Figure 3: Time to CED (95%) for a pedestrian user (5 km/h) in an urban environment (from design phase)
These results show clearly that the provision of the Reduced CED is of great advantage for the computation of the first position fix. The RedCED word repeated twice every 30 seconds gives the users a much higher chance to receive CED during good channel state conditions, even if these just hold for short time intervals. It is also important to underline the great performance gain enabled by the Reed Solomon encoded CED pages, through which the time to achieve nominal accuracy is significantly reduced.
It is underlined that the expected performance as represented above was consolidated through an In-Orbit Validation phase (see Service Notice #10). Regarding the Secondary Synchronisation Pattern, this brings a relevant improvement in the receivers' time-to-synchronisation with the Galileo time: it is reduced to 4 seconds (worst case), 3 seconds (mean value), and 3.9 seconds (95%).
As announced in Service Notice #11, starting from August 2022, the Galileo FOC satellites were upgraded to support the I/NAV message transmission. As of 13th of August 2023, the Galileo constellation, except GSAT0201, GSAT0202 and the IOV satellites (GSAT0101, GSAT0102, GSAT0103, GSAT0104), is fully updated and transmitting the improved I/NAV message.
[1] The I/NAV message is the navigation message broadcast on Galileo E5b-I and E1-B signal components (see OS SIS ICD).
[2] These results are obtained through simulations including proper channel modelling.